









Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:298 Gear Ratio
Description
The first step in a robotics project is getting a motor spinning. Not all motors spin at the same speed due to variations in voltage, environment, and manufacturing. Determining motor speed involves using an encoder wheel with an optical or magnetic counter to count rotations.
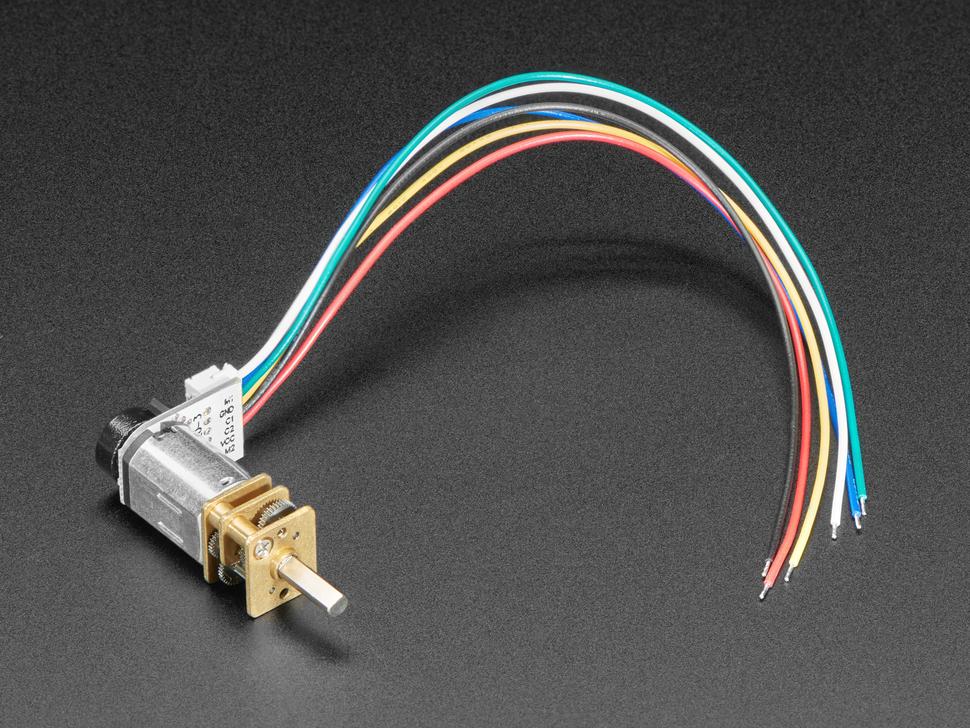
This motor simplifies the process with an attached magnetic wheel and two hall effect sensors, eliminating complex wiring. It's compact, fitting into the standard N20 size, and operates efficiently with 4.5 to 6V DC. Connections are straightforward: white and red wires for motor driving, PWM support for speed adjustment, blue wire for ground, and black wire for power. The yellow and green wires provide encoder outputs.
An example Arduino sketch is available, adaptable to other languages, for interrupt counting and speed calculation using a 1:298 gear ratio. The motor uses 6V nominal power, drawing around 100 mA (200 mA stalled), and varying the gear ratio affects torque and RPM, not current draw.
Properties
| Brand | Adafruit |
| Model | 4641 |
Delivered in 10 to 12 days
 Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:298 Gear Ratio Delivered in 10 to 12 days € 19,50
Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:298 Gear Ratio Delivered in 10 to 12 days € 19,50 Customer questions
Customer Reviews
- Reduced In stock -49 % Adafruit White LED Backlight Module - Small 12mm x 40mm € 2,75 € 1,40 View product
- Reduced In stock -50 % Adafruit JST-PH 2-Pin SMT Right Angle Breakout Board € 2,10 € 1,05 View product
- Reduced In stock -49 % Adafruit Mini Metal Speaker w/ Wires - 8 ohm 0.5W € 2,75 € 1,40 View product
- Reduced In stock -49 % Adafruit Stacking Headers for Feather - 12-pin and 16-pin female headers € 1,75 € 0,90 View product
- Reduced 3 pieces In stock -50 % Adafruit LED Filament - 3V 26mm long - Warm White 3 Pack € 6,35 € 3,20 View product
- Reduced In stock -49 % Adafruit Single-Ended Flexible LED Filament - 3V 25mm long - Green € 3,55 € 1,80 View product
- Reduced In stock -50 % Adafruit NOOds - Flexible LED Filament - 3V 300mm long - Yellow € 10,45 € 5,25 View product
- Reduced In stock -50 % Adafruit Ultimate GPS HAT for Raspberry Pi A+/B+/Pi 2/3/4/Pi 5 € 41,70 € 20,85 View product
- Reduced In stock -50 % Adafruit Waterproof Polarized 4-Wire Cable Set € 3,50 € 1,75 View product
- Reduced In stock -50 % Adafruit IR Break Beam Sensor with Premium Wire Header Ends - 5mm LEDs € 8,30 € 4,15 View product
- Reduced In stock -49 % Adafruit Speaker - 3" Diameter - 4 Ohm 3 Watt € 2,75 € 1,40 View product
- Reduced In stock -49 % Adafruit Waterproof DC Power Cable Set - 5.5/2.1mm € 3,55 € 1,80 View product
- Reduced In stock -50 % Adafruit NOOds - Flexible LED Filament - 3V 300mm long - Red € 10,45 € 5,25 View product
- Reduced 10 pieces In stock -50 % Adafruit Break-away 0.1" 36-pin strip male header - Black - 10 pack € 6,90 € 3,45 View product
- Reduced In stock -50 % Adafruit Woven Conductive Fabric - 20cm square € 6,90 € 3,45 View product