









Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:150 Gear Ratio
Description
The initial step in a robotics project involves getting a motor to spin, revealing variations in speed due to voltage, environment, and manufacturing differences. To accurately measure the motor's speed, an encoder wheel can be attached, along with an optical or magnetic counter. This combination allows your microcontroller to count the passing spokes and determine speed efficiently.
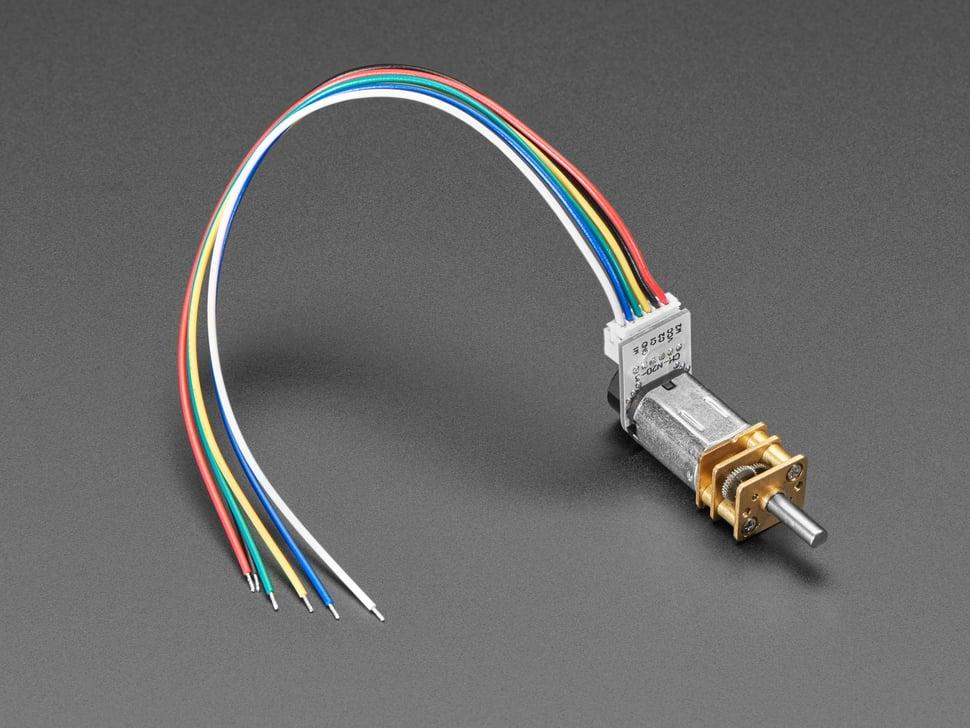
Enhance your setup by adding a second counter to detect direction along with speed, simplifying the process with our specially designed motor. This motor, not only compact in the standard N20 size, comes equipped with a magnetic wheel and two pre-attached hall effect sensors, ensuring seamless integration.
The motor operates optimally with a 4.5 to 6V DC supply through its white and red wires, which connect to your motor driver and allow speed adjustment via PWM with an H-bridge. Ground the blue wire to your microcontroller, provide 3-5V DC to the black wire, and read the hall effect outputs from the yellow and green wires for precise feedback.
An example sketch is available for Arduino, adaptable to other programming languages, utilizing interrupts on encoder pins to calculate speed. This motor features a 1:150 gear ratio, requires 6V nominal power, and draws around 100mA, peaking at 200mA when stalled. The gear ratio adjusts torque and RPM without affecting current draw, providing versatility across applications.
Properties
| Brand | Adafruit |
| Model | 4640 |
ETA is not known
 Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:150 Gear Ratio € 15,50
Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:150 Gear Ratio € 15,50 Customer questions
Customer Reviews
- In stock Adafruit White LED Backlight Module - Medium 23mm x 75mm € 3,25 View product
- In stock Adafruit Waterproof DC Power Cable Set - 5.5/2.1mm € 3,25 View product
- In stock Adafruit Breadboard-friendly SPDT Slide Switch € 1,25 View product
- In stock Adafruit Small Enclosed Piezo w/Wires € 1,25 View product
- In stock Adafruit Mini Metal Speaker w/ Wires - 8 ohm 0.5W € 2,50 View product
- In stock Adafruit JST PH 2-Pin Cable – Male Header 200mm € 1,- View product
- In stock Adafruit Small Alligator Clip to Male Jumper Wire Bundle - 6 Pieces € 6,40 View product
- In stock Adafruit NOOds - Flexible LED Filament - 3V 300mm long - Lime Green € 8,75 View product
- In stock Adafruit NOOds - Flexible LED Filament - 3V 300mm long - Warm White € 5,75 View product
- In stock Adafruit Woven Conductive Fabric - 20cm square € 6,25 View product
- In stock Adafruit Single ended nOOds - 128mm long Flexible LED Filament - Blue 3V € 5,- View product
- In stock Adafruit Micro Lipo - USB LiIon/LiPoly charger € 7,50 View product
- 5 pieces In stock Adafruit NeoPixel Diffused 5mm Through-Hole LED - 5 Pack € 6,25 View product
- In stock Adafruit Stereo Enclosed Speaker Set - 3W 4 Ohm € 9,25 View product
- In stock Adafruit bq25185 USB / DC / Solar Charger with 3.3V Buck Board € 11,25 View product
Recently viewed items
- Adafruit N20 DC Motor with Magnetic Encoder - 6V with 1:150 Gear Ratio € 15,50 View product
- Adafruit 6 x AA battery holder with 5.5mm/2.1mm plug € 3,25 View product
- Adafruit NeoTrellis RGB Driver PCB for 4x4 Keypad € 15,50 View product
- Adafruit Ultra-Fine Stranded Wire Spool - 10 meters - 32AWG - Black € 9,25 View product
- Adafruit Alpha Dual-Gang 16mm Right-angle PC Mount - 100K Audio € 3,25 View product