









SparkFun RedBot Sensor - Mechanical Bumper
Description Attachments
The mechanical bumper sensor is equipped with a three-pin header. This allows for a direct connection to the RedBot Mainboard using female-to-female jumper wires. With the RedBot library, it's easy to program your robot to navigate around obstacles efficiently.
It's important to note that most RedBot tutorials recommend using two Mechanical Bumper Sensors. Keep this in mind when deciding on the quantity for your order.
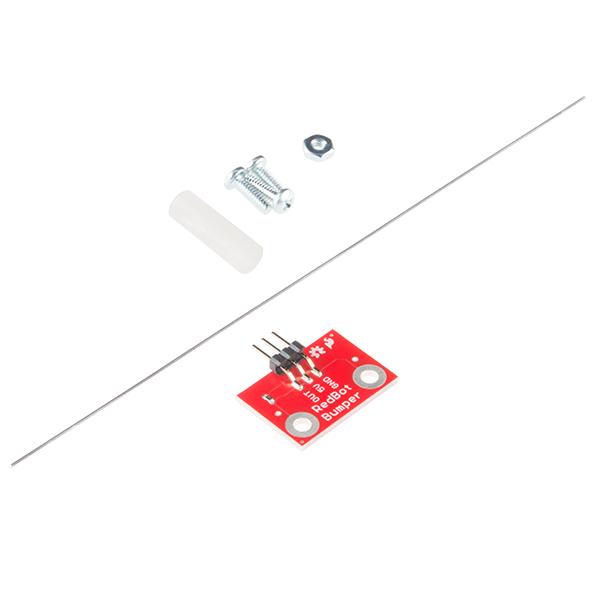
The package includes:
- One Mechanical Bumper Board
- One Whisker
- One 19.05mm 4-40 Nylon Standoff
- One 4-40 Hex Nut
- Three 9.53mm 4-40 Phillips Machine Screw
The mechanical bumper sensor features a compact size of 26.27 x 17.67 mm, making it a perfect fit for your RedBot.
For more detailed information, you can access the schematic, Eagle files, RedBot Experiment Guide, RedBot Shadow Chassis Assembly Guide, and GitHub from the SparkFun website. You can also watch the product video to see the Mechanical Bumper Sensor in action.
The SparkFun RedBot Sensor - Mechanical Bumper is a small addition that can make a big difference to your robot's performance. It's an essential tool for any robot builder looking to improve their RedBot's navigation and avoid potential collisions.
Properties
| Brand | Sparkfun |
| Model | SEN-11999 |
| More info | GitHub - sparkfun/RedBot_Whisker_Bumper: Super-simple board to provide the RedBot with a mechanical whisker to detect collisions. |
| Length | 100 mm |
| Width | 130 mm |
| Height | 7 mm |
| Weight | 14,2 g |
Delivered in 5 to 7 days
 SparkFun RedBot Sensor - Mechanical Bumper Delivered in 5 to 7 days € 4,85
SparkFun RedBot Sensor - Mechanical Bumper Delivered in 5 to 7 days € 4,85 Customer questions
Customer Reviews
- Reduced In stock -50 % Sparkfun Audio Jack 3.5mm € 2,50 € 1,25 View product
- Reduced In stock -49 % Sparkfun Raspberry Pi Pico Headers Kit € 2,25 € 1,15 View product
- Reduced In stock -47 % Sparkfun Battery Holder - 1xAAA (PTH) € 0,75 € 0,40 View product
- Reduced In stock -45 % Sparkfun Capacitor Ceramic 0.1uF € 0,55 € 0,30 View product
- Reduced In stock -50 % Sparkfun Arduino Stackable Header Kit - R3 € 4,- € 2,- View product
- Reduced In stock -49 % Sparkfun Rocker Switch - SPST (right-angle) € 1,75 € 0,90 View product
- Reduced In stock -49 % Sparkfun Break Away Headers - 40-pin Male (Long Centered, PTH, 0.1") € 2,25 € 1,15 View product
- Reduced In stock -50 % SparkFun Level Shifting microSD Breakout € 9,- € 4,50 View product
- Reduced In stock -50 % Sparkfun 555 Timer € 1,50 € 0,75 View product
- Reduced In stock -50 % Sparkfun Arduino Pro Mini 328 - 5V/16MHz € 15,50 € 7,75 View product
- Reduced In stock -50 % SparkFun Line Sensor Breakout - QRE1113 (Digital) € 6,25 € 3,15 View product
- Reduced 2 pieces In stock -50 % Sparkfun ESP32 Thing Stackable Header Set € 3,50 € 1,75 View product
- Reduced In stock -50 % Sparkfun Hook-up Wire - Yellow (22 AWG) € 4,50 € 2,25 View product
- Reduced In stock -50 % Sparkfun Hook-up Wire - Brown (22 AWG) € 5,25 € 2,65 View product
- Reduced In stock -50 % Sparkfun Diode Rectifier - 1A, 50V (1N4001) € 0,50 € 0,25 View product